

The Florida Institute for Human & Device Cognition (IHMC) is well acknowledged in bipedal robotics circles for instructing quite complicated humanoid robots to stroll. Considering the fact that 2015, IHMC has been residence to a Boston Dynamics Atlas (the DRC model) as properly as a NASA Valkyrie, and important development has been built on advancing these platforms towards trusted mobility and manipulation. But essentially, we’re speaking about some really outdated hardware in this article. And there just aren’t a lot of superior substitution solutions (offered to scientists, in any case) when it arrives to humanoids with human-equivalent toughness, pace, and versatility.
A number of yrs in the past, IHMC made the decision that it was substantial time to build its have robotic from scratch, and in 2019, we observed some pretty interesting plastic concepts of Nadia—a humanoid intended from the ground up to perform beneficial jobs at human pace in human environments. Just after 16 (!) experimental plastic variations, Nadia is now a authentic robot, and it already seems very extraordinary.
For a extensive time, we have been pushing up towards the boundaries of the hardware with DRC Atlas and Valkyrie. We haven’t been ready to totally discover the boundaries of our application and our controls. With Nadia, it is the other way close to, which is genuinely interesting from a study perspective.
—Robert Griffin, IHMC
Created to be in essence the subsequent era of the DRC Atlas and Valkyrie, Nadia is speedier, far more adaptable, and sturdy sufficient to make an outstanding investigate system. It’s a hybrid of electric and hydraulic actuators: 7 degrees-of-liberty (DoF) electric arms and a 3 DoF electrical pelvis, coupled with a 2 DoF hydraulic torso and 5 DoF hydraulic legs. The hydraulics are integrated good actuators, which we have lined in the earlier. Nadia’s joints have been arranged to increase vary of motion, meaning that it has a dense manipulation workspace in entrance of by itself (in which it truly matters) as perfectly as very mobile legs. Carbon fiber shells covering most of the robotic let for protected get in touch with with the surroundings.
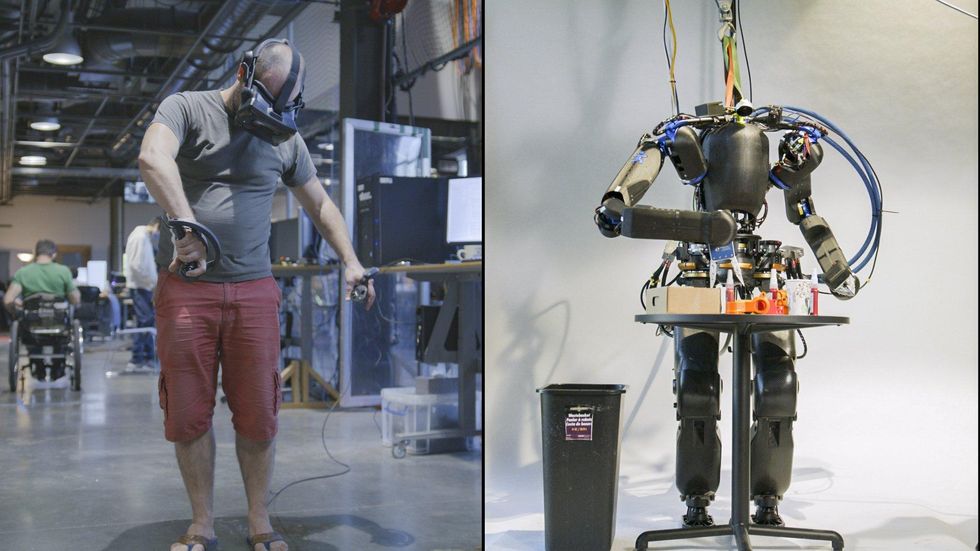
Teleoperation via immersive digital reality assists Nadia accomplish elaborate tasks.IHMC
That substantial manipulation workspace is significantly pertinent for the reason that there is a ton of emphasis on immersive digital reality teleoperation with Nadia. Not that autonomy is not crucial, but the idea at the rear of Nadia has been shaped (at least in section) by IHMC’s expertise at the DARPA Robotics Obstacle Finals: Ideally, you want the robotic to manage anything it can on its very own, although obtaining a human in a position to choose a lot more immediate regulate more than sophisticated duties. Whilst it’s not the fantasy of a robot becoming totally autonomous, the fact is that in the around term, this tactic is an quickly viable way of having robots to reliably do useful things in unstructured environments. Overall, the target with Nadia is to function as shut to human velocity as attainable when carrying out city exploration and manipulation tasks. And if that includes a human straight teleoperating the robotic mainly because that is the best way of carrying out factors, Nadia is built to take care of it.
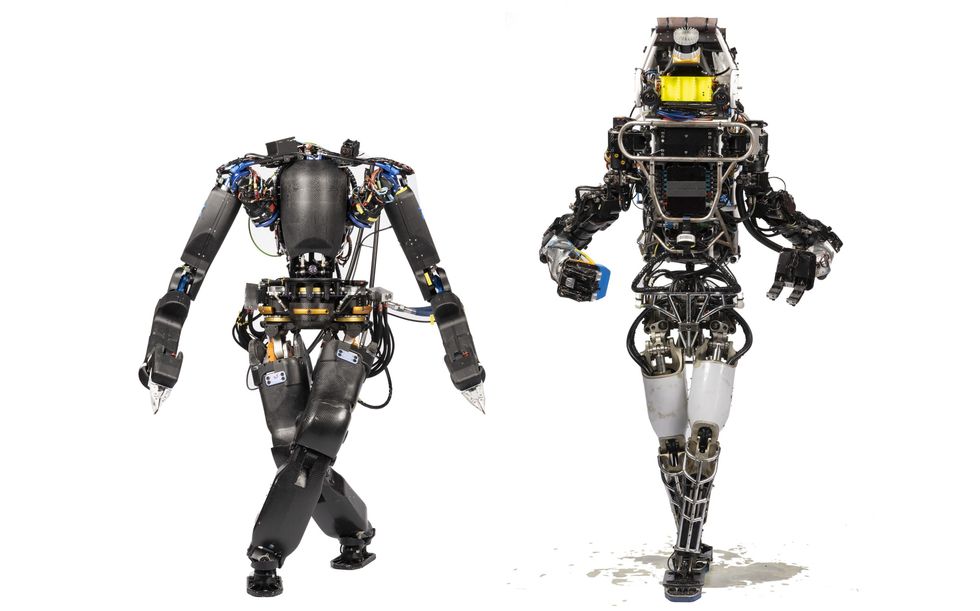
Nadia demonstrates how a great deal extra versatile its hips and legs are relative to DRC Atlas.IHMC
For a lot more particulars about Nadia, we spoke with Robert Griffin, a research scientist at IHMC.
How is Nadia one of a kind between humanoid robots?
Robert Griffin: I believe the major thing that we’re trying to provide to the table with Nadia is the definitely substantial range of motion of a good deal of the joints. And it’s not just the array of movement that differentiates Nadia from a lot of other humanoid robots out there, it’s also speed and ability. Nadia has a great deal superior electric power-to-weight than the DRC Atlas, making it appreciably more rapidly, which improves its typical operational speed as very well as its security.
Can you set your goals with Nadia into context in the humanoid robotics space?
Griffin: We’re hoping to make Nadia a robotic that can functionality in unstructured environments exactly where you really do not know what it requirements to do forward of time. So, alternatively of getting a set sequence or amount of responsibilities, we’re attempting to develop up a robotic in hardware, software package, and interfaces that enable a human-device workforce to go into an mysterious ecosystem, check out it, map it, and then do meaningful jobs.
IHMC has a reputation for aiding intricate humanoid robots like DRC Atlas and Valkyrie with their mobility. How has all of that practical experience made its way into Nadia’s style and design?
Griffin: You are ideal, and we have been partnering with NASA JSC because the DRC—when you see Valkyrie strolling now, it is employing IHMC computer software and controllers. When it will come to implementing some of that information to Nadia, we’ve paid unique notice to factors like Nadia’s vary of movement in its legs. Contrary to a whole lot of humanoid platforms, Nadia has really very good hip roll (or ab/adduction), which usually means that it can do definitely extensive actions and also genuinely narrow actions in which the feet overlap every single other. We assume that is likely to help improve mobility by helping with stage adjustment and achieving complicated footholds.
Further than the components, we ended up also able to use our simulation instruments and control stack to actually assist us specify what the components design and style wanted to be in get to accomplish some of these jobs. We weren’t able to enhance all of the joints on the robot—we pretty a great deal stuck with a one hydraulic piston in the legs, for now, but we hope that our future types will be superior integrated and optimized. We do have full ankle actuation, as opposed to a whole lot of humanoid robots. Our solution, from the starting, was to appear for the essential management authority with Nadia’s ft to be able to do specific foot placement, and use that for rather brief reactive mobility.
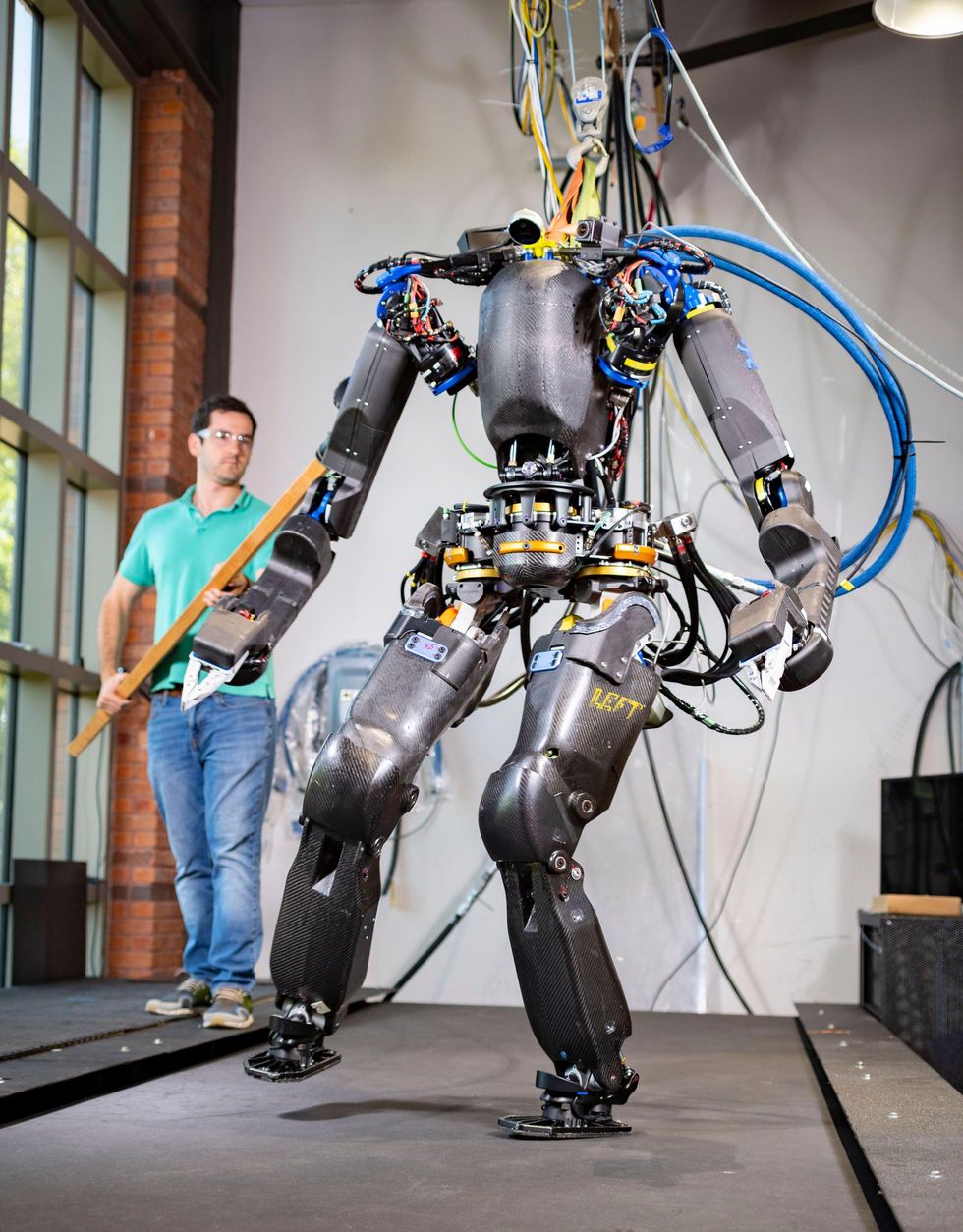
Robert Griffin presents Nadia a valuable shove, for science.IHMC
As you went from notion to hardware with Nadia, what compromises did you have to make?
Griffin: We’re not pretty as adaptable as a common human, whilst we’re not extremely significantly off. I was astonished that we shed some vary of motion in the mechanisms just for the reason that of the hydraulic hose routing, primarily all around the hips, the place we wanted to steer clear of owning large loops of hoses hanging off the robot. We finally want to consider Nadia into the serious environment, and we really do not want the hoses receiving snagged on issues.
Nadia is not really as rapid as a human in some of the joints, and in some of the joints it is a lot quicker. We’re also not quite as compact as we needed to be initially, mainly because, perfectly, robots are truly tough. We’re hoping to get it a small more compact in the long term. And we skipped our weight margin by a little bit—it’s about 90 kilograms appropriate now, without the need of the hydraulic pump or battery on board.
Why did you come to a decision to focus on how a human can specifically handle Nadia in VR, as opposed to much more emphasis on autonomy?
Griffin: Autonomy performs really, actually properly when you know what the working ailments are, and what you are striving to execute. Not that it is effortless to automate that, but it is feasible. We’ve experimented with some autonomous arranging and manipulation, and we located that it’s a minimal restricting in that it doesn’t take advantage of the complete capabilities of our system. And so what we’re seeking at accomplishing is attempting to automate just important parts of the system—things like footstep planning and grasp scheduling, which can be automatic quite very well. But we also will need the potential to interact with novel environments, which is why we’re focusing on producing ways to group with human beings by means of interfaces like virtual reality. With the cognitive capabilities of a human blended with the manipulation abilities of the robotic, we think you get a ton of flexibility.
How significantly of a big difference has it designed to managing Nadia in VR, that the hardware has humanlike versatility and a humanlike workspace?
Griffin: For manipulation, it’s been huge. We never want the user to be running the robotic and feeling like they’re confined in what they can do because of the robot’s constraints. A whole lot of the manipulation that we’ve been ready to do with Nadia we could in no way have performed with our other platforms.
There are surely trade-offs—the arms are far more designed for velocity than for energy, which is likely to be a minor bit restricting, but we’re hoping to strengthen that long-term. I assume that coming up with the robot—and specially the command method and application architecture—with the thought of obtaining a human operating it has opened up a great deal of capacity that we hope will allow us rapidly iterate together a lot of various paths.
What are some matters that Nadia will be uniquely capable of?
Griffin: We’re hoping that the robot will be uniquely able of multicontact locomotion—that’s a course that we’re truly hoping to shift in, where we’re not just relying on our ft to shift as a result of the earth. But I really don’t essentially want to say that it’ll be better at that than other robots are, since I never know anything that other robots can do.
Are there functional jobs that you hope Nadia will be able to do at some stage in the foreseeable future?
Griffin: Factors like catastrophe reaction, nuclear remediation, bomb disposal—these responsibilities are largely carried out by people today appropriate now, due to the fact we do not have robots that are really able of carrying out them adequately irrespective of the total of time that roboticists have been performing on it. I think that by partnering great robotic engineering with truly incredible functioning interfaces and human cognition, these jobs will start to grow to be possible to do by a robotic.
Who wants a authentic head when you have googly eyes and a shark mouth?IHMC
Even nevertheless Nadia is model new, IHMC already has a bunch of upgrades prepared for the robot. The most noticeable 1 is slicing that tether by placing batteries and a personalized hydraulic pump into Nadia’s torso. Also on the road map are increased torque arms and lighter, more streamlined legs. In the meantime, the application has a good deal of catching up to do to make it possible for Nadia to attain its complete likely. And if we know IHMC, which is going to be an incredibly interesting matter to see.
